Digitalstyrt Modelljernbane
|
Digitalstyrt Modelljernbane |
|

Tekst & foto
Jarle H Hansen
For artikkelforfatteren har det endelige målet med digitalstyring vært å kunne benytte PC til å kunne fullautomatisere hele eller deler av anlegget..
I de tre første artiklene har jeg gått gjennom en rekke ulike komponenter som man i mer eller mindre grad trenger for å kunne foreta automatisk togstyring. Dette kan oppsummeres i :
- Digitalstyringsanlegg
- Lokomotiv med dekoder
- Skiftespor dekoder
- Tilbakemeldingsenheter.
- Et såkalt interface som knytter sammen PC/programvare med Digitalstyringsanlegget
- Og sist men ikke minst PC med dertil egnet styringsprogram
Det er viktig å være klar over at det stilles forholdsvis store krav til PC’ens ytelse når det gjelder prosessorhastighet og minne. Det er lett å gå i den fellen at man kan børste støvet av en hvilken som helst gammel PC. Kravet er avhengig av antall digitale komponenter som skal kontrolleres/styres og hvor mye som skal behandles automatisk.
Eksempel på et styringsprogram
Undertegnede har i de siste årene vært så heldig å få være Beta-tester for produsenten av TrainController og Rocomotion. Skjermbildene og oppbyggingen vil nok variere fra program til program slik at jeg i denne artikkelen kun går inn på de mest sentrale delene for å vise programmets virkemåte. I denne sammenhengen må man anta prinsippene vil gjelde for de fleste digitalstyrings-programmer. De som synes dette blir for mye reklame utfordrer jeg til å skrive en artikkel om ’sitt program’
Skjermbildene som vises i denne artikkelen er hentet fra TrainController v7.0 Gold som ble lansert 23.11.2008.
TrainController vil etter hvert finnes i 3 ulike varianter : Bronze, Silver og Gold hvor Gold er den mest avanserte.
Rocomotion er et slags forenklet utgave av TrainController 5.8 men kan kun benyttes med Roco sitt digitale enhet 10785 for å kommunisere med LokMaus2/MultiMaus.
Lokomotiver
For at et PC-program skal kunne få et lokomotiv/togsett til å oppføre seg naturtro, må man på en eller annen måte fortelle programmet hvordan lokomotivene oppfører seg.
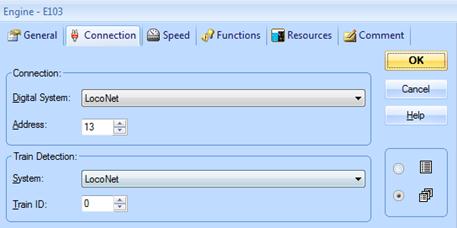
Først definerer man et lokomotiv og dets funksjoner og dets digitale adresse slik at programmet sender kommandoene til riktig tog.
Merk at man også angir hvilke type lokomotiv det er. Dette fordi man kan kjøre med såkalt ressurssimulering.
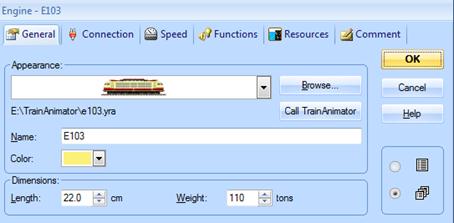
Dette betyr at man må passe på at det er nok diesel eller kull/olje om man kjører med damp lokomotiver. En kan også knytte til bilder for enklere gjenkjenning i programmet.
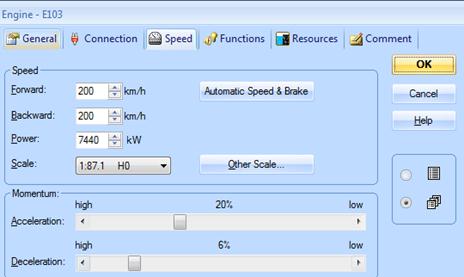
Andre egenskaper som forbildets hastigheter, vekt og motorkraft er også elementer som er med og bestemmer hvordan lokomotivet oppfører seg.
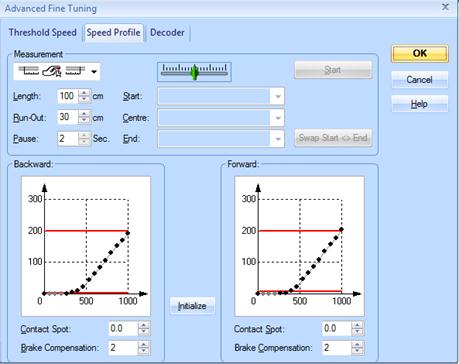
Deretter må man foreta en såkalt hastighetskalibrering.
(Automatic Speed & Brake). Dette kan gjøres på en forenklet måte ( a la Rocomotion) , hvor man kjører lokomotivet på laveste hastighet som lokomotivet kjører jevnt i, deretter ”40 km/t” og til sist lokomotivets maksimale hastighet. Disse tre hastighetene må så lagres slik at programmet ’vet’ og gjenkjenner disse hastighetene når lokomotivene kjøres av programmet.
Eller man kan benytte en av flere mer avanserte metoder. Fra tidtaking til å la programmet automatisk kjøre en kalibreringsrutine ved at lokomotivet ’pendler’ mellom to/tre tilbakemeldingsenheter og selv finner ut lokomotivets egenskaper.
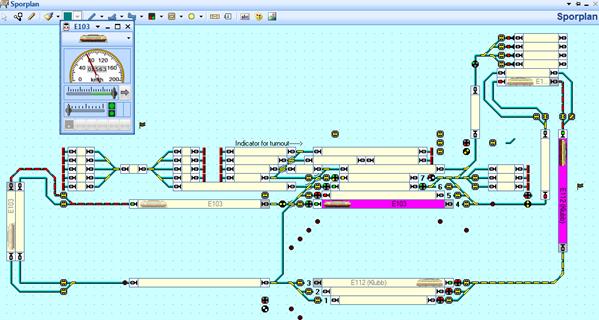
Blokker
For å få til en mest mulig naturtro kjøring er definisjon av blokkene svært viktig.
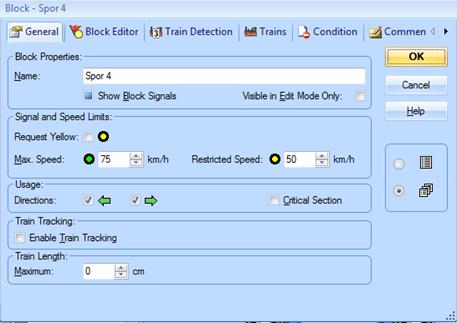
I blokkene defineres blant annet hvilke adresse tilbakemeldingsenheten har. Videre angir man maksimumshastigheten samt hastigheten som gjelder når det foreligger en restriksjon, som f.eks gult lys eller skiftespor som ligger i avvik. I tillegg kan en benytte såkalte virtuelle tilbakemeldere. Disse virtuelle tilbakemelderne finnes ikke som virkelige tilbakemeldingsenheter og er altså kun definert programmert. Disse er bestemt som resultat av hendelser knyttet til andre virkelige tilbakemeldingsenheter. Basert på at programmet kjenner alle lokomotivers oppførsel kan disse virtuelle tilbakemelderne ’plasseres’ med stor nøyaktighet på anlegget. Man kan med andre ord klare seg med et mindre antall fysiske tilbakemeldingsenheter ved å bruke denne typen meldere for definere når et tog skal begynne å bremse og til sist hvor det skal stanse helt..
Man kan også definere hvilke tog som har adgang til den aktuelle blokken. Dette gjør at man kan sende godstog ut på helt andre ruter enn passasjer tog eller lokaltog for den saks skyld. En må også sette opp en sporplan som viser anleggets spor og skiftespor
For hvert skiftespor/signal må det settes opp hvilken adresse enheten er koplet til slik at programmet kan kontrollere enheten.
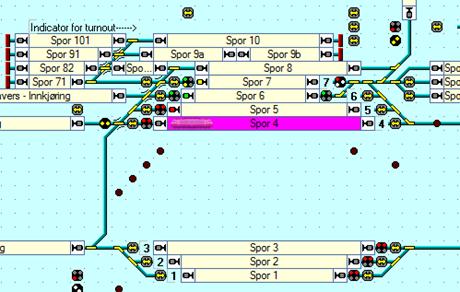
Videre må blokker defineres og knyttes til adresser for tilbakemeldingsenheter. Blokker som er belagt er merket med rødlig bakgrunn samt tekst og bilde av hvilket lokomotiv som er i blokken. Når disse stegene er gjennomført og man har tildelt blokker med lokomotiver kan programmet identifisere hvilke tog som befinner seg hvor, uavhengig av ’transponding/railcom’ eller andre former for toveis-kommunikasjon. Programmet har full støtte for slik kommunikasjon og evt posisjonstilbakemelding fra skiftespor og lignende, men er altså ikke strengt tatt nødvendig.
Ruteplaner
For fullautomatisering må en også sette opp ruteplaner (schedules)
Disse ruteplanene benyttes for å definere hvilke blokker som inngår i den aktuelle ruten.
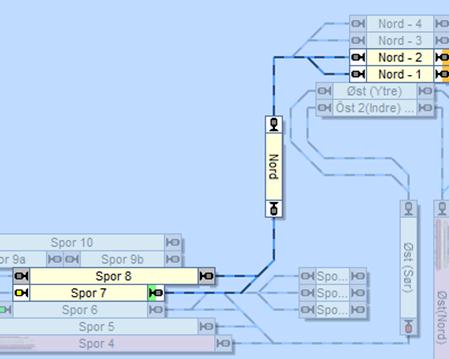
I tilfellet over er det satt opp en pendelrute som tar et tog fra Spor 7 eller Spor 8 og kjører det opp til Nord – 1 eller Nord – 2, venter der noen minutter for så å returnere til Spor 7 eller Spor 8.
Programmet sørger for at blokker som er opptatt ikke blir benyttet av andre tog med mindre du har spesifisert dette. Å kjøre inn i opptatte blokker er selvfølgelig aktuelt ved rangering.
Tidtabeller
Om ønskelig kan en sette opp rutetider hvor en bestemmer hvilke ruteplaner som skal kjøres når. På denne måten kan man sette opp flere ulike ruter til å kjøre i et selvvalgt system.

Ulike kjøremodi
De ulike ruteplanene kan kjøres enten automatisk, gul, rød eller manuell.
Som det ligger i navnet betyr automatisk at PC programmet kjører alt automatisk. Gul betyr at PC kjører automatisk men du kan med håndkontrollen kontrollere toget når det skal kjøre i full fart. Rød modus betyr at du har full kontroll men programmet vil stanse deg om du prøver å kjøre på rødt lys. Til sist har vi manuell modus som betyr at du har den hele og fulle kontroll uten innblanding fra PC. Du kan ha alle typer kjøre modi i ditt oppsett.
Lokomotiver kan kjøres manuelt enten ved å bruke digitalsystemets egen håndkontroll eller en kan benytte de skjermbaserte kontrollene. Programmet har altså kommunikasjon med de håndholdte kontrollene og dette vil gjenspeiles i programmets skjermbilde. Eller produsentens egen grafisk håndkontroll som må kjøpes separat.


Skisse av produsentens egen håndkontroll Skjermbasert ’håndkontroll’
Ut over de kort beskrevne funksjonene kan man også i Gold versjonen styre dreieskive/travers.
Systemet kan også bygges ut med flere moduler som f.eks nettverk slik at flere PC’er kan benyttes til å styre ulike deler av anlegget. Dette kan være svært praktisk på et større anlegg eller et anlegg som strekkes seg over flere rom. Det finnes også en modul for ’stasjonær’ lyd. Denne kan benyttes for å annonsere avganger eller andre lyder. Modulen lar deg også definere lokomotiv lyder og kan vha inntil 7 høytalere simulere at togene flytter seg rundt på anlegget. Dette vil altså kunne være en erstatning for lyddekodere.
En takk til Ole Palerud som har kommet med nyttig synspunkter og kommentarer til mine artikler.
God jernbanejul !
Henvisning : www.freiwald.com